
Chào Bạn,
Cuộc sống của chúng ta tồn tại trong cùng lúc với nhiều thực thể vật lý, những thứ chúng ta nhận biết được như là các vận động cơ học, tác dụng của nhiệt (nhận biết qua lớp da), của ánh sáng (nhận biết qua mắt), của âm thanh (nhận biết qua tai), của mùi (nhận biết qua mũi), của vị (nhận biết qua lưỡi), và nhất là của điện. Hiện nay, điện tử học là một công cụ phục vụ con người nhiều nhất, chúng ta có radio, cassette, TV, máy ghi hình, máy tính....Ưu điểm của các thiết bị điện là xử lý các vấn đề rất nhanh, nhưng các thiết bị điện thì lại chỉ làm việc với tín hiệu thuộc điện, mà chung quanh chúng ta không phải chỉ có các hiện tượng thuộc điện mà song song còn rất nhiều hiện tượng phi điện khác đang tồn tại, từ đó người ta nghĩ đến các SENSOR. Sensor là các cảm biến, nó dùng để chuyển đổi các tín hiệu không thuộc điện ra dạng tín hiệu điện và đưa vào các dạng mạch điện để xử lý. Ngày nay có rất nhiều, rất nhiều loại SENSOR. Trong lần này, chúng ta sẽ tìm hiểu loại sensor dùng phát hiện các vật thể nóng có chuyển động ngang, quen gọi là PIR moton detector.
PIR là gì?

Nó là chữ viết tắt của Passive InfraRed sensor (PIR sensor), tức là bộ cảm biến thụ động dùng nguồn kích thích là tia hồng ngoại. Tia hồng ngoại (IR) chính là các tia nhiệt phát ra từ các vật thể nóng. Trong các cơ thể sống, trong chúng ta luôn có thân nhiệt (thông thường là ở 37 độ C), và từ cơ thể chúng ta sẽ luôn phát ra các tia nhiệt, hay còn gọi là các tia hồng ngoại, người ta sẽ dùng một tế bào điện để chuyển đổi tia nhiệt ra dạng tín hiệu điện và nhờ đó mà có thể làm ra cảm biến phát hiện các vật thể nóng đang chuyển động. Cảm biến này gọi là thụ động vì nó không dùng nguồn nhiệt tự phát (làm nguồn tích cực, hay chủ động) mà chỉ phụ thuộc vào các nguồn tha nhiệt, đó là thân nhiệt của các thực thể khác, như con người con vật...
Trước hết, chúng ta tìm hiểu cấu trúc của một cảm biến PIR (Bạn xem hình).

Trên đây là đầu dò PIR, loại bên trong gắn 2 cảm biến tia nhiệt, nó có 3 chân ra, một chân nối masse, một chân nối với nguồn volt DC, mức áp làm việc có thể từ 3 đến 15V. Góc dò lớn. Để tăng độ nhậy cho đầu dò, Bạn dùng kính Fresnel, nó được thiết kế cho loại đầu có 2 cảm biến, góc dò lớn, có tác dụng ngăn tia tử ngoại.
Hình vẽ cho thấy cách dùng đầu dò PIR để phát hiện người hay con vật di chuyển ngang.
Nguyên lý làm việc của loại đầu dò PIR như hình sau:

Các nguồn nhiệt (với người và con vật là nguồn thân nhiệt) đều phát ra tia hồng ngoại, qua kính Fresnel, qua kích lọc lấy tia hồng ngoại, nó được cho tiêu tụ trên 2 cảm biến hồng ngoại gắn trong đầu dò, và tạo ra điện áp được khuếch đại với transistor FET. Khi có một vật nóng đi ngang qua, từ 2 cảm biến này sẽ cho xuất hiện 2 tín hiệu và tín hiệu này sẽ được khuếch đại để có biên độ đủ cao và đưa vào mạch so áp để tác động vào một thiết bị điều khiển hay báo động.
Hình vẽ cho thấy 2 vùng cảm ứng nhậy cảm tương ứng với 2 cảm biến trong đầu dò. Khi có một con vật đi ngang, từ thân con vật sẽ luôn phát ra tia nhiệt, nó được tiêu tụ mạnh với kính Fresnel và rồi tiêu tụ trên bia là cảm biến hồng ngoại, vậy khi con vật đi ngang, ở ngả ra của đầu dò chúng ta sẽ thậy. xuất hiện một tín hiệu, tín hiệu này sẽ được cho vào mạch xử lý để tạo tác dụng điều khiển hay báo động.
Bạn xem hình động sau đây dùng diễn tả nguyên lý làm việc của đầu dò PIR đối với người qua lại:

Hãy nói về các tia nhiệt:

Mọi vật thể đều được cấu tạo từ các phân tử nhỏ li ti, nhiệt là một dạng năng lượng tạo ra từ các xao động của các phân tử (Bạn xem hình), đó là các chuyển động hỗn loạn, không trật tự. Từ các xao động này, nó phát ra các tia nhiệt, bằng cảm giác thông thường của giác quan, con người chúng ta nói đó là sức nóng. Ở mỗi người nguồn thân nhiệt thường được điều ổn ở mức 37 độ C, đó là nguồn nhiệt mà ai cũng có và nếu dùng linh kiện cảm ứng thân nhiệt, chúng ta sẽ có thiết bị phát hiện ra người, đó chính là ý tưởng mà người ta chế ra thiết bị motion detector, điều khiển theo nguồn thân nhiệt chuyển động.
Hình vẽ sau đây cho thấy vật liệu nhóm pyroelectric được dùng làm cảm biến dò tia nhiệt.

Người ta kẹp vật liệu pyroelectric giữa 2 bản cực, khi có tác kích của các tia nhiệt, trên hai 2 bản cực sẽ xuất hiệu tín hiệu điện, do tín hiệu yếu nên cần mạch khuếch đại.
Trong bộ đầu dò PIR, người ta gắn 2 cảm ứng PIR nằm ngang, và cho nối vào cực Gate (chân Cổng) của một transistor FET có tính khuếch đại. Khi cảm biến pyroelectric thứ nhất nhận được tia nhiệt, nó sẽ phát ra tín hiệu và khi nguồn nóng di chuyển ngang, sẽ đến cảm biến pyroelectric thứ hai nhận được tia nhiệt và nó lại phát ra tín hiệu điện. Sự xuất hiện của 2 tín hiệu này cho nhận biết là đã có một nguồn nhiệt di động ngang và mạch điện tử sẽ phát ra tín hiệu điều khiển. Tín hiệu này có thể dùng tắt mở đèn hay dùng để báo động khi có kẻ lạ vào nhà.
Bây giờ hãy nói đến thiết bị tiêu tụ gôm tia nhiệt rọi trên bề mặt cảm ứng PIR:
Chúng ta biết các tia nhiệt phát ra từ thân thể người rất yếu và rất phân tán, để tăng độ nhậy phải dùng kính có mặt kính lồi tạo chức năng tiêu tụ, quen gọi là kinh Focus, hình động dưới đây cho thấy các mặt sóng của các tia sáng khi đi qua một mặt kính lồi đã được cho gôm lại tại một điểm nhỏ, điểm đó gọi là tiêu điểm ( 焦点 , theo âm Hán Việt, chữ tiêu 焦 bên dưới có bộ hỏa 灬 火 , vậy nó có nghĩa là điểm nóng, nhiều Bạn dùng kính lúp tạo ra điểm nóng, điểm nóng này có thể đốt cháy giấy đấy, đó là trò chơi của các bạn nhỏ).


Khuyết điểm của loại kính hội tụ dùng mặt lồi thông thường là khi mặt kính mở rộng, điểm tiêu tụ sẽ không nằm ở một chổ, người ta cho hiệu chỉnh sai lệch này bằng mặt kính Fresnel (Bạn xem hình, các mặt cong ở xa trục quang đã được chỉnh lại). Bạn thấy khi ở xa trục quang học, độ cong của mặt kính được hiệu chỉnh lại, với cách làm này, chúng ta sẽ có thể hội tụ nhiều tia sáng tốt hơn, trên một diện tích rộng lớn hơn và như vậy sẽ tăng được độ nhậy cao hơn và có góc dò rộng hơn.
Tìm hiểu kính Fresnel.

Để hiểu rõ hơn về cách tiêu tụ dùng kính Fresnel, Bạn có thể Click và Xem nguyên lý kính Fresnel, Từ giải thích qua đoạn phim ngắn này, Bạn sẽ thấy kính Fresnel tạo tính tiêu tụ tốt hơn loại kính lồi thông thường nhất là khi mở rộng mặt kính.
Một sơ đồ mạch điện điển hình:
Sau đây là một sơ đồ điển hình cho thấy cách kết hợp giữa đầu dò PIR và mạch khuếch đại, mạch so áp (dùng ic LM324) và mạch tạo trễ (dùng ic logic CD4538) để có các tiếp điểm lá kim (của một relay) dùng điều khiển các dụng cụ điện khác.

Phân tích sơ đồ mạch điện:
Sơ đồ cho thấy, bộ đầu do PIR có 3 chân, chân 3 cho nối masse, chân 1 nối vào đường nguồn và chân 2 cho xuất ra tín hiệu, nguyên do phải phân cực cho đầu PIR là vì bên trong nó có dùng transistor FET. R2 (100K) là điện trở lấy tín hiệu. Tín hiệu này cho qua 2 tầng khuếch đại với IC1A và IC2B. Ở đây, người ta dùng mạch hồi tiếp nghịch với R4 (1M), R3 (10K) và tụ C2 (10uF) để định độ lợi cho tầng khuếch đại này (do 1M/10K = 100, nên độ lợi tầng này lấy khoảng 100), tụ C3 (0.1uF) có tác dụng ép dãy tần hẹp lại, chỉ cho làm việc ở vùng tần thấp bỏ vùng tần cao (vì tác nhân nhiệt có quán tính lớn, thường thay đổi rất chậm), tín hiệu lấy ra trên chân 1 cho qua điện trở giảm biên R5 (10K) và tụ liên lạc C4 (10uF) vào tầng khuếch đại sau trên chân số 6.
Mạch dùng điện trở R6 (1M), diode D1, D2 và điện trở R7 (1M) tạo thành cầu chia áp, nó lấy áp phân cực cho chân 5 của tầng khuếch đại và tạo điện áp mẫu (Vref) cấp cho chân 9 (ngả vào đảo) và chân 12 (ngả vào không đảo) của 2 tầng so áp IC1C và IC1D. Điện trở R8 (1M) và tụ C5 (0.1uF) tạo tác dụng hồi tiếp nghịch, ổn định cho tầng khuếch đại IC1B. Tín hiệu cảm biến sau khi được khuếch đại cho ra trên chân 7, rồi cùng lúc đưa vào 2 tầng so áp trên chân 10 và chân 13. Đây là 2 tầng so áp có chu trình hồi sai, dùng tạo ra xung kích thích có độ dóc tốt, kích vào tầng đa hài đơn ổn trong ic CD4538, diode D3 và diode D4 có công dụng cách ly tránh ảnh hưởng qua lại của 2 đường ra trên chân 8 và chân 14.
CD 4538 là ic logic có 2 tầng đơn ổn, nó định thời gian quá độ (thời gian trễ) theo thời hằng của điện trở R10 (1M) và tụ C6 (1uF) trên chân số 2. Xung làm chuyển trạng thái đưa vào trên chân 4, khi chuyển mạch mức áp cao cho xuất hiện trên chân số 6, nó sẽ kích dẫn transistor thúc Q1, và Q1 cấp dòng cho relay để đóng các tiếp điểm lá kim. Do dùng mạch đơn ổn, định thời theo thời hằng của R10 và tụ C6, nên chỉ sau một thời gian qui định, mạch sẽ tự trở lại trạng thái ổn cố, Q1 sẽ tắt và relay sẽ bị cắt dòng và nhã tiếp điểm lá kim ra
Mạch có thể làm việc với mức nguồn nuôi từ 5 đến 12V (Bạn chú ý mức nguồn nuôi để chọn loại relay cho thích hợp).
Tóm lại, khi có người đi ngang qua bộ đầu dò, nguồn thân nhiệt của người hay con vật sẽ tác kích vào đầu dò PIR, thì relay sẽ được cấp dòng để đóng các tiếp điểm lá kim, Bạn có thể dùng các tiếp điểm này để mở đèn, và sau một lúc mạch đơn ổn trở về trạng thái vốn có và đèn sẽ tự tắt. Chúng ta đã có mạch tắt mở đèn theo "hơi người qua lại" rồi phải không? Thích không?
Tư liệu về 2 ic LM324 và CD4538 dùng trong mạch:

Trong ic LM324 có 4 tầng khuếch đại toán thuật (op-amp), Bạn có thể dùng các tầng khuếch đại op-amp này để khuếch đại các tín hiệu hay dùng làm tầng so áp. Đây là ic có rất nhiều công dụng, Bạn tải tư liệu liên quan ở phần mục download để hiểu rõ hơn.

Đây là ic có 2 bộ đa hài đơn ổn, thời gian quá độ có thể xác định theo mạch thời hằng với điện trở và tụ điện. Mạch sẽ tự trở lại trạng thái ổn cố sau thời gian qui định. IC này rất thông dụng trong các mạch điều khiển.
Các sơ đồ mạch điện tham khảo:
Sau đây là các sơ đồ tham khảo (tôi sưu tầm từ trên mạng), trong các sơ đồ này, bộ đầu dò PIR dùng phát hiện chuyển động của các nguồn thân nhiệt của người và con vật và cho xuất tín hiệu để đóng mở đèn hay mạch báo động, nguyên lý làm việc cũng tương tự như mạch điện điển hình đã phân tích ở phần trên..
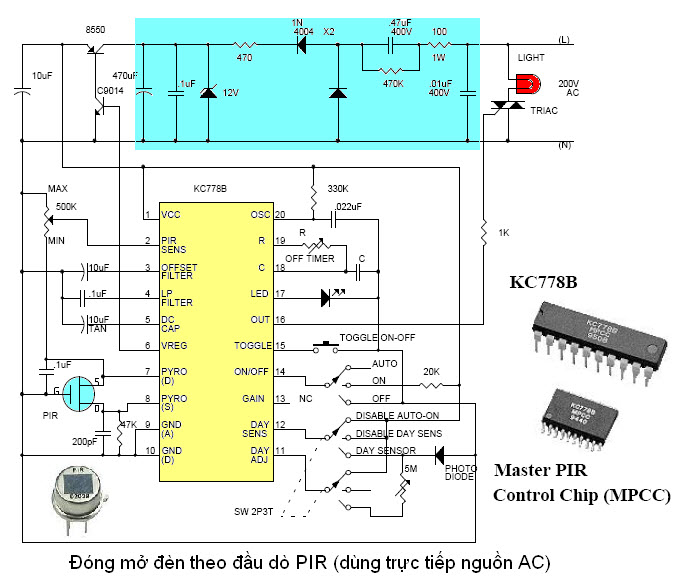
Mạch 1: Mạch dùng ic KC778B chuyên dùng cho đầu dò cảm biến PIR, dùng làm mạch tự tắt mở đèn theo hơi người, làm việc trực tiếp với nguồn điện AC, cho giảm áp bằng tụ và tắt mở đèn bằng TRIAC,
Mạch 2: Mạch dùng ic KC778B chuyên dùng cho đầu dò cảm biến PIR, dùng làm mạch tự tắt mở đèn theo hơi người, làm việc trực tiếp với nguồn điện AC, cho giảm áp bằng tụ và tắt mở đèn bằng tiếp điểm của relay,

Mạch 3: Mạch dùng ic KC778B chuyên dùng cho đầu dò cảm biến PIR, dùng làm mạch tự tắt mở đèn theo hơi người, làm việc trực tiếp với nguồn điện DC (12V), tắt mở đèn bằng relay và có trang bị quang trở (SCd) để mạch chỉ tác dụng trong đêm tối,

Mạch 4: Mạch dùng ic HT7601A chuyên dùng cho đầu dò cảm biến PIR, dùng làm mạch tự tắt mở đèn theo hơi người, làm việc trực tiếp với nguồn điện AC, cho giảm áp bằng tụ và tắt mở đèn bằng relay.

Mạch 5: Mạch dùng ic HT7601B chuyên dùng cho đầu dò cảm biến PIR, dùng làm mạch tự tắt mở đèn theo hơi người, làm việc trực tiếp với nguồn điện AC, cho giảm áp bằng tụ và tắt mở đèn bằng TRIAC,

Mạch 6: Mạch dùng ic KC778B chuyên dùng cho đầu dò cảm biến PIR, dùng để phát hiện người theo thân nhiệt, dùng điều khiển với các loại thiết bị cắm lỗ OUTPUT, làm việc với nguồn điện DC, có dùng quang trở (SCd) để mạch chỉ có tác dụng trong đêm tối.

Mạch 7: Mạch tắt mở đèn theo hơi người dùng đầu dò PIR, và tắt mở đèn với TRIAC, mạch dùng trực tiếp đường nguồn AC và cho giảm áp bằng tụ.

Phạm Văn Ngọc Anh- 01644326695
Đăng nhận xét